

扫码咨询





WHAT DO WE DO/ 我们做什么?
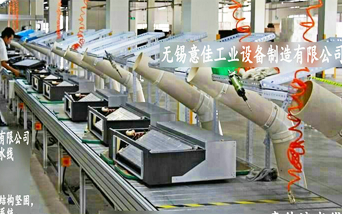
无锡意佳工业设备制造有限公司成立于2001年,系定制化各类型装配流水线系统的专业制造商。我公司在无人飞机、中央空调机组、电气控制柜、电梯关键零部件,电动机、液压泵阀马达等行业的系统装配线方面具有一定的优势;公司生产的装配流水线系统在航空、航天、军用无人机、电子元器件、机械、轻工等领域都有典型应用;在防静电、净化车间等特殊要求的装配流水线系统方面具有独到的解决方案;
.更多.




COOPERATIVE CUSTOMERS
合作客户






智能化流水线发展趋势
传统的集约化加工和制造业,传统制造企业的生产过程大多是以单件流生产方式为基础的,这种生产线模式的最大缺点是在某些瓶颈工序中通常会有大量的半成品,如果工艺复杂,生产环节多,这种现象就会更加严重。只有通过人工智能的改造,才能克服这种生产线上的浪...
-
24
2020/10
智能化流水线发展趋势传统的集约化加工和制造业,传统制造企业的生产过程大多是以单件流生产方式为基础的,这种生产线模式的最大缺点是在某些瓶颈工序......
-
23
2020/10
U形导轨输送线主要应用的行业环形导轨作为一种新型的高科技智能设备,凭着优越的性能备受企业青睐。在智能化时代的大背景下,倍泰科技研发生产的精密链节环形......
-
22
2020/10
AGV智能设备主力复工复产在新型冠状病毒到达拐点之前,制造业还需要大量的劳动力才能恢复生产。对于互联网、电子商务等行业来说,可以通过远程办公来解决......
2018年 - 继往开来
2017年,无锡意佳工业设备制造有限公司遵循“科学管理,持续改进,质量层控,客户满意”的质量方针,
依托优质的产品和完善的售后服务拓展市场空间,满足客户不同要求,并在不断开拓与发展中凝聚了一批高素质的企业管理人才和技术熟练的员工队伍,
今后,公司也将继往开来,扩大销售网络及打造完善产品销售网络化和优良的售后服务。 .探索历史.
依托优质的产品和完善的售后服务拓展市场空间,满足客户不同要求,并在不断开拓与发展中凝聚了一批高素质的企业管理人才和技术熟练的员工队伍,
今后,公司也将继往开来,扩大销售网络及打造完善产品销售网络化和优良的售后服务。 .探索历史.
-
2001年
与中国船舶重工集团合作
-
2011年
与西子孚信科技电梯行业合作
-
2012年
与航天动力科技有限公司合作
-
2013年
与江森自控工业全球制造合作
-
2017年
与南京航空航天大学制造合作